











Código QR

Sobre nós
Produtos
Contate-nos

Telefone

E-mail

Endereço
22, Hongyuan Road, Guangzhou, Província de Guangdong, China

1 、 Visão geral do projeto
Este plano tem como objetivo personalizar um sistema de plataforma de prática de educação de robôs para atender às necessidades de ensino de um laboratório universitário em visão de máquina e controle de força. O sistema será desenvolvido em torno do robô colaborativo AUBO-I5, câmera industrial Hikvision, câmera 3D e sensor de força de seis eixos para obter funções como controle de robôs, inspeção visual e montagem de controle de força e fornecem um software de computador superior de código aberto para expansão funcional posterior.

2 、 Composição de hardware do sistema
ROBOT: Adotando robô colaborativo AUBO-I5, possui as características de alta precisão e alta segurança e é adequado para cenários de ensino.
Câmera: incluindo a câmera industrial Hikvision e a câmera 3D, usada para obter informações de imagem de peças de trabalho, suportando o processamento tradicional de imagens e a detecção de imagem de aprendizado profundo.
Sensor de força de seis dimensões: Kunwei (KWR75) ou outras marcas são selecionadas para o monitoramento em tempo real das informações de interação de força entre o efetor final do robô e a peça de trabalho.
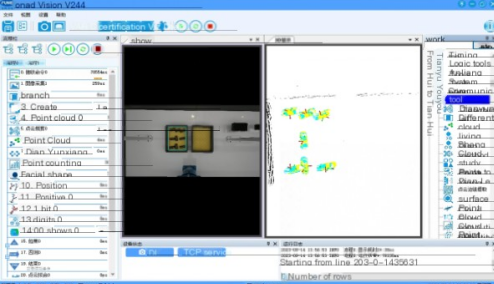
3 、 Design de software de computador superior
Funções básicas:
Controle do robô: implemente funções como conexão, desconexão, controle de robôs de conexão, junta ou postura dos robôs.
Controle da câmera: implemente funções como conexão com a câmera, desconexão e aquisição de imagens.
Exibição de status: Exibição em tempo real da junta do robô e do status da pose, parâmetros de status do sensor de força de seis eixos e imagens capturadas pela câmera.
Recursos exclusivos:
Conjunto do orifício do eixo: Através da operação do computador superior, combinada com a inspeção visual e a tecnologia de controle de força, a função de montagem automática do orifício do eixo é alcançada.
Design da interface: a interface superior do computador deve ser concisa, clara e fácil de operar. A interface deve incluir botões básicos de função e uma área de exibição de status, além de fornecer acesso à função de montagem do orifício do eixo.
4 、 Implementação da função
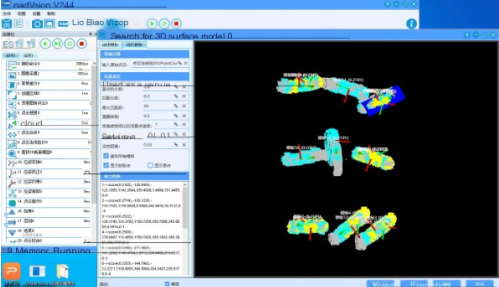
Visão da máquina:
Detecção de imagem tradicional: Usando a correspondência de modelos, ajuste de círculo, encaixe de borda e outros métodos para localizar e reconhecer peças de trabalho, apoiando o reconhecimento de códigos de barras, códigos QR, números de caracteres, bem como o cálculo da área de escala de cinza e da quantidade de placas.
Detecção de imagem de aprendizado profundo: reconhecimento automático e localização de peças de trabalho por meio de algoritmos de aprendizado profundo. Embora o aprendizado profundo ainda exija anotação manual de imagens, nos esforçaremos para melhorar a eficiência do treinamento e a precisão do reconhecimento, reduzindo gradualmente a carga de trabalho de anotação.
Conjunto de controle de energia:
Combinando dados de sensores de força seis dimensionais, atinge o controle de interação de força entre o efetor final do robô e a peça de trabalho e completa montagem precisa do orifício do eixo.
5 、 Riscos de projeto e medidas de resposta
Risco de cooperação com seis sensores de força do eixo: Devido à falta de cooperação com seis sensores de força do eixo, pode haver certas dificuldades e incertezas técnicas. Organizaremos uma equipe técnica profissional para resolver o problema e garantir a integração suave e a operação estável dos sensores.
Risco de detecção de imagem de aprendizado profundo: A detecção de imagem de aprendizado profundo requer um certo nível de precisão e eficiência do reconhecimento, ao mesmo tempo em que atende ao requisito de um treinamento de um clique. Continuaremos a otimizar os algoritmos de aprendizado profundo para melhorar a precisão e a eficiência do reconhecimento, enquanto exploramos maneiras de implementar um treinamento de um clique.
6 、 pós -expansão e troca de cenas
O software de computador superior adota o design de código aberto, que facilita a expansão funcional e a troca de cenas, conforme necessário no ensino posterior. Por exemplo, a cena da montagem dos orifícios do eixo pode ser alterada para tarefas como a malha de engrenagens finas ou o reconhecimento e a agarração de outras peças de trabalho. Ao modificar e depurar programas de código aberto, é fácil obter funções de operação e detecção visual de robôs em diferentes cenários.
Esse plano integra recursos de hardware, como robôs, câmeras e sensores de força de seis eixos, combinados com o design de software de computador superior de código aberto, para fornecer um ambiente de ensino rico e facilmente expansível para a plataforma de prática de educação de robôs. Através do uso de plataformas práticas, os alunos podem obter uma compreensão mais profunda dos princípios e aplicações da visão de visão e controle da força e melhorar suas habilidades práticas e inovadoras.
22, Hongyuan Road, Guangzhou, Província de Guangdong, China
