











Código QR

Sobre nós
Produtos
Contate-nos

Telefone

E-mail

Endereço
22, Hongyuan Road, Guangzhou, Província de Guangdong, China

Visão geral do projeto
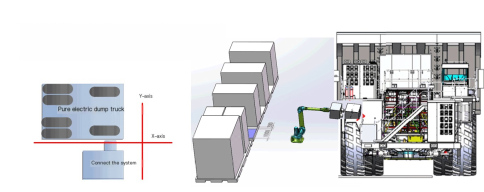
Este projeto tem como objetivo projetar um sistema de carregamento automático eficiente e estável do caminhão automático para atender às necessidades de cobrança dos clientes em condições de produção interna na região de Shanxi. O sistema precisa obter operação e controle não tripulados de veículos de engenharia, apenas concluindo as funções de manuseio e carregamento automáticas dos pontos A e B para atender aos requisitos de operação contínua da linha de produção.
Composição do sistema
Sistema de posicionamento visual: Utilizando câmeras de alta precisão e algoritmos visuais para obter um posicionamento preciso da porta de carregamento em caminhões basculantes. O sistema visual precisa ter a capacidade de resistir à poeira e à luz solar direta, garantindo operação estável em vários ambientes internos.
Robôs e mecanismos de empurrão de armas: robôs industriais com extensão de braço de 3m ou mais são selecionados, equipados com mecanismos de empurramento de armas especialmente projetados. O mecanismo de empurrão de armas deve ter impulso e precisão suficientes para garantir que a pistola de carregamento possa ser inserida com precisão e rapidez na porta de carregamento.
Sistema de carregamento: equipado com equipamentos de carregamento de alta potência de 3 megawatts, garantindo que o caminhão basculante possa ser totalmente carregado em um curto período de tempo e melhorar a eficiência da produção.
Sistema de controle: através de um sistema de controle integrado, o controle preciso do posicionamento visual, o movimento do robô e o processo de carregamento pode ser alcançado. O sistema de controle deve ter altas características de automação e inteligência e conseguir um carregamento automático não tripulado.
Fluxo de trabalho
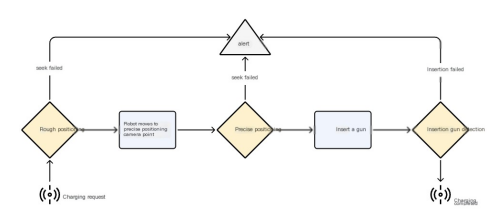
Posicionamento do caminhão de despejo automático: Identifique e localize a posição da porta de carregamento do caminhão basculante através de um sistema de posicionamento visual.
Robot Motion: O sistema de controle orienta o robô a se aproximar da porta de carregamento do caminhão basculante com base nos resultados do posicionamento visual.
Empurrando a inserção de armas: o robô está equipado com um mecanismo de pistola, que insere com precisão e rapidamente a pistola de carregamento na porta de carregamento do caminhão basculante.
Processo de carregamento: o sistema de carregamento começa a carregar o caminhão basculante até atingir o nível de energia ou o tempo predefinido.
Evacuação do robô: Após a conclusão do carregamento, o robô evacuará a porta de carregamento e aguardará a chegada do próximo caminhão basculante.
Tecnologia -chave
Tecnologia de posicionamento visual: usando algoritmos como aprendizado profundo, a precisão e a estabilidade dos sistemas de posicionamento visual podem ser melhorados.
Tecnologia de controle de robôs: otimize a trajetória e a velocidade do movimento do robô para melhorar a eficiência de carregamento.
Projeto do mecanismo de empurrão de armas: verifique se o mecanismo de empurrão de armas tem impulso e precisão suficientes, considerando sua compactação e confiabilidade estruturais.
Resposta ao risco
Proteção ambiental interna: garanta um ambiente interno limpo e seco, reduza o impacto da poeira e a luz solar direta no sistema de posicionamento visual.
Manutenção de hardware: Manter regularmente e manutenção de hardware, como robôs e sistemas de posicionamento visual, para garantir sua operação normal.
Avaliação profissional: Convide profissionais para avaliar e otimizar o mecanismo de empurração de armas, sistema de carregamento etc., para garantir a segurança e a viabilidade da solução.
22, Hongyuan Road, Guangzhou, Província de Guangdong, China
