











Código QR

Sobre nós
Produtos
Contate-nos

Telefone

E-mail

Endereço
22, Hongyuan Road, Guangzhou, Província de Guangdong, China

À medida que a indústria de manufatura acelera para maior precisão e eficiência, requisitos mais altos foram colocados no nível de automação e inteligência no processo de produção. Diante de peças de trabalho complexas e altamente precisas, como anéis inerciais, os métodos tradicionais de carregamento tornaram -se inadequados. Nesse momento, o aumento da tecnologia da visão 3D trouxe soluções revolucionárias a esse problema. Ele não apenas melhora muito a precisão da alimentação, mas também aprimora significativamente a flexibilidade e a eficiência da linha de produção.
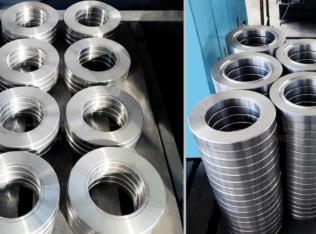
O princípio básico da tecnologia de visão 3D é processar e analisar as informações espaciais tridimensionais dos objetos por meio de computadores e alcançar operações como reconhecimento de objetos, detecção, rastreamento e medição. Na aplicação da alimentação precisa dos anéis inerciais, a tecnologia de visão 3D captura as informações espaciais tridimensionais do anel inercial, fornecendo ao robô uma posição e postura precisas de agarrar, alcançando assim a alimentação precisa do anel inercial.

Em termos de algoritmos de imagem, a tecnologia 3D Vision adota algoritmos avançados para lidar com situações complexas, como reflexão de superfície e cobertura de filmes de petróleo de anéis inerciais. Ao otimizar algoritmos, o sistema é capaz de gerar dados claros e precisos da nuvem de pontos, fornecendo uma base sólida para o reconhecimento e captura subsequentes.
Em termos de seleção de câmera, os sistemas de visão 3D precisam escolher câmeras com alta resolução, grande campo de visão e grande profundidade de campo. Esse tipo de câmera pode capturar as informações completas da forma e do tamanho do anel inercial, garantindo que o robô possa encontrar com precisão a posição alvo durante o processo de agarrar. Ao mesmo tempo, a característica de grande profundidade de campo permite que a câmera mantenha efeitos claros de imagem a diferentes distâncias, melhorando ainda mais a precisão da alimentação.

Além de algoritmos de imagem e seleção de câmera, a tecnologia 3D Vision também precisa estar intimamente integrada aos sistemas de controle de robôs. Ao transmitir informações espaciais tridimensionais em tempo real do anel de inércia para o sistema de controle de robôs, o robô pode localizar com precisão a posição do anel de inércia e executar a agarração. Essa troca de informações em tempo real permite que os robôs ajustem rapidamente suas estratégias de compreensão ao enfrentar anéis de inércia de diferentes especificações, alcançando a produção flexível.
A Tecnologia da Visão 3D desempenhou um papel importante no processo de alimentação preciso dos anéis inerciais. Ao otimizar os algoritmos de imagem, selecionar câmeras apropriadas e cooperar de perto com os sistemas de controle de robôs, essa tecnologia alcança uma compreensão eficiente e precisa dos anéis inerciais, melhora a eficiência da produção e reduz os custos de produção.
22, Hongyuan Road, Guangzhou, Província de Guangdong, China
