











Código QR

Sobre nós
Produtos
Contate-nos

Telefone

E-mail

Endereço
22, Hongyuan Road, Guangzhou, Província de Guangdong, China

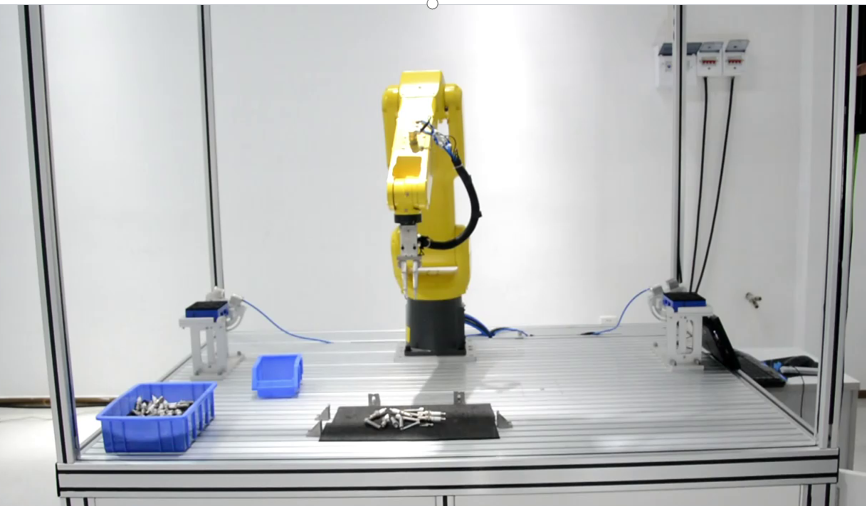
Com a melhoria contínua da automação de fabricação, uma grande empresa de peças automotivas propôs a necessidade de usar robôs compostos para concluir a classificação dos parafusos, a fim de melhorar a eficiência da produção e reduzir os custos de mão -de -obra. A Fuwei Intelligent usa robôs compostos, combinados com câmeras industriais 3D e controladores de alto desempenho, para obter uma aderência automática de parafusos, melhorando assim a eficiência operacional geral da linha de produção.
Dificuldades do projeto
1. Requisitos de alta precisão: os parafusos são pequenos componentes que exigem que os robôs identifiquem e compreendam com precisão, evitando danos ao produto ou tempo de inatividade na linha de produção.
2. Os robôs precisam se adaptar a fatores dinâmicos, como diferentes posições de prateleira e mudanças nos pontos de segurança.
3. Ao garantir a precisão dos ingredientes, é necessário otimizar o processo de operação do robô e melhorar a eficiência operacional geral.

Solução
Ao utilizar câmeras industriais 3D e controladores de alto desempenho, os robôs podem localizar com precisão os componentes dos parafusos e ajustar as estratégias de compreensão em tempo real através do reconhecimento visual, garantindo estabilidade e precisão.
O controlador integrado inteligente da Fuwei coleta sinais de oficina para obter integração perfeita entre robôs e linhas de produção. Controle simultâneo de vários eixos, ajuste flexível da trajetória de acordo com as alterações no rack de material e os pontos de segurança, adaptando -se a ambientes dinâmicos.
Otimize o processo de lição de casa, reduza o tempo de espera e melhore a eficiência da captura. Defina um tempo de ciclo de lição de casa razoável e ajuste a quantidade de agarrar e montar de acordo com a demanda para atender às necessidades reais da linha de produção.
Processo de ação:
Depois de receber a solicitação de captura de material, o robô composto começa a se mover para a posição designada do produto. Em seguida, o robô realizará o posicionamento visual para garantir um reconhecimento e compreensão precisos do produto. Durante o processo de posicionamento, se o sistema detectar que o número de produtos é menor que o valor definido, ele desencadeará um alarme e tentará reposicionar. Se o posicionamento for bem -sucedido, o robô continuará a executar operações de compreensão; Se o posicionamento falhar, ele passará para a localização do próximo produto e tentará novamente. Após o bem -estar bem -sucedido, o robô moverá o produto para a área de descarga para concluir a operação de descarga. Durante todo o processo, o posicionamento visual e a agarração são as principais etapas, garantindo que o robô possa concluir com eficiência e precisão as tarefas de carregamento e descarregamento.
Vantagens técnicas:
Pode se adaptar a mudanças drásticas na iluminação ambiental e substituir o trabalho manual;
Algoritmo inteligente de prevenção e planejamento de trajetórias de obstáculos robóticos com base no aprendizado profundo para detecção e localização de objetos;
Pode se adaptar a cenários em que várias peças de trabalho são produzidas simultaneamente.
Valores centrais:
Reduza os custos e aumente a eficiência, melhore a estabilidade, coloque rapidamente em produção com operação simples e se adapte rapidamente a novos produtos.
Esse plano melhorará significativamente a eficiência operacional da linha de produção. Enquanto isso, através da tecnologia precisa de posicionamento e agarração, o risco de danos ao produto e tempo de inatividade na linha de produção pode ser reduzido, melhorando a qualidade do produto e a estabilidade da produção. Além disso, a adaptabilidade a ambientes dinâmicos e o controle eficiente do ritmo aumentará ainda mais a flexibilidade e a velocidade de resposta da linha de produção, atendendo às necessidades de produção em constante mudança do GAC Toyota.
22, Hongyuan Road, Guangzhou, Província de Guangdong, China
