











Código QR

Sobre nós
Produtos
Contate-nos

Telefone

E-mail

Endereço
22, Hongyuan Road, Guangzhou, Província de Guangdong, China

Slam, também conhecido como posicionamento síncrono e construção de mapas, é uma tecnologia de núcleo crucial no campo da tecnologia de robô móvel. Ele permite que os robôs estimam simultaneamente sua própria posição e construa mapas ambientais em ambientes desconhecidos, que é a chave para alcançar a navegação e exploração autônomas.
1 、 Princípio da tecnologia SLAM
A idéia principal da tecnologia SLAM é obter auto -localização e construção de mapas de robôs em ambientes desconhecidos através da fusão e processamento de dados do sensor (como Lidar, câmeras etc.). Especificamente, a tecnologia SLAM consiste em duas partes principais: odometria frontal e otimização de back-end.
1. Odômetro frontal: Esta seção é principalmente responsável por estimar a trajetória de movimento do robô através dos dados do sensor. Ele calcula o deslocamento relativo e a transformação de atitude do robô analisando as alterações nos dados do sensor em momentos consecutivos. Os métodos comuns incluem correspondência de recursos, fluxo óptico, etc. A saída do odômetro front-end é uma estimativa preliminar da pose do robô, mas devido ao ruído do sensor e erros acumulados, esses resultados de estimativa geralmente não são precisos o suficiente.
2. Otimização de back -end: Para melhorar a precisão do posicionamento e a consistência do mapa, a tecnologia SLAM apresenta um processo de otimização de back -end. Esta seção utiliza dados históricos, detecção de loop e outros métodos para calibrar e otimizar os resultados do odômetro front-end. Os métodos de otimização comumente usados incluem métodos baseados em filtro (como filtro Kalman estendido, filtro de partículas etc.) e métodos de otimização baseados em gráfico. Esses métodos podem efetivamente reduzir erros cumulativos e melhorar a precisão do posicionamento do robô e da construção de mapas.
3 、 A aplicação da tecnologia SLAM em robôs móveis
A tecnologia SLAM, como uma das principais tecnologias de robôs móveis, possui amplas perspectivas de aplicativos em vários campos. Aqui estão vários casos de aplicação típicos:
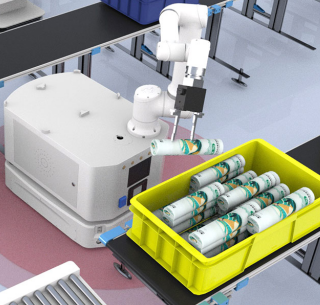
1. Navegação autônoma: Nos campos de armazenamento e logística, usinagem, etc., os robôs móveis precisam obter funções de navegação autônomas. Ao utilizar a tecnologia SLAM, os robôs podem perceber o ambiente em tempo real e construir mapas, planejando assim o caminho ideal e indo autonomamente para o local do alvo. Isso melhora muito a eficiência do trabalho e a autonomia dos robôs.
2. Exploração e modelagem ambiental: Em ambientes desconhecidos, os robôs móveis podem usar a tecnologia SLAM para exploração e modelagem ambiental. Coletando contínuo dados do sensor e atualizando as informações do mapa.
3. Interação da máquina humana e serviços inteligentes: com o desenvolvimento contínuo da tecnologia de inteligência artificial, os robôs móveis estão sendo cada vez mais aplicados nos campos da interação da máquina humana e serviços inteligentes. Ao utilizar a tecnologia SLAM para obter um posicionamento preciso e reconhecimento de cenas, os robôs podem fornecer aos usuários uma experiência de serviço mais personalizada e inteligente. Por exemplo, orientar os clientes em shopping centers e acompanhar as pessoas idosas em casa têm amplas perspectivas de aplicativos.
A tecnologia SLAM, como uma das principais tecnologias dos robôs móveis, fornece um forte suporte para alcançar a navegação autônoma e a exploração ambiental. Ao mesmo tempo, diante de cenários de aplicativos complexos e em constante mudança e atualizando constantemente as demandas do usuário, também precisamos continuar prestando atenção e pesquisando novas tecnologias e métodos de SLAM para promover o desenvolvimento e a aplicação adicional da tecnologia de robôs móveis.
22, Hongyuan Road, Guangzhou, Província de Guangdong, China
